

.png)

.png)





.png)


.png)



В станках, кранах, лифтовых приводах, промышленных роботизированных системах требуется очень точное позиционирование вала и регулирование частоты его вращения. Использование частотных преобразователей с векторным управлением с обратной связью по скорости позволяет решить эту задачу.
Для претенциозного регулирования скорости и позиционирования вала двигателя в состав электропривода включаются энкодеры. Использование частотно-регулируемого привода с датчиками скорости и положения позволяет заменить дорогостоящие сервоприводы.

Виды энкодеров
Энкодер – устройство для преобразования угла поворота или скорости вращения в электрический сигнал. По выходному сигналу различают:
- Инкрементальные энкодеры. Принцип действия этих устройств основан на подсчете количества импульсов, которое пропорционально повороту или частоте вращения вала. При использовании этих устройств необходимо задать нулевые точки для привязки датчика к конкретной системе отсчета.
- Абсолютные энкодеры. Такое устройства не требуют задания референтных точек. Абсолютные датчики выдают данные о текущем положении вала без интерпретации количества импульсов.
По принципу действия различают оптические и магнитные энкодеры (датчики Холла).
Состав электропривода на базе частотного преобразователя с точным позиционированием
Привод механизмов с точным позиционированием содержит:
- Электродвигатель синхронного или асинхронного типа.
- Датчик углового перемещения или скорости (энкодер).
- Сопрягающую плату.
- Частотный преобразователь.
- Контроллер движения.
Современные частотные преобразователи для оборудования с претенциозным регулированием положения рабочих органов или частоты вращения имеют функцию IMC, которая позволяет обойтись без сопрягающей платы и контроллера.

Как построить систему позиционирования
При построении системы позиционирования необходимо решить следующие задачи:
- Определить характер перемещения оси (абсолютный или относительный). При относительном перемещении за нулевую точку принимается положение вала при включении оборудования.
При абсолютном перемещении при загрузке системы должны определяться абсолютные координаты вала относительно заданных осей координат.
- Подобрать энкодер. Эти элементы выбирают по количеству импульсов или бит за один оборот, типу и количеству выходов, габаритов корпуса, степени защиты IP, диаметру и типу вала.
- Подобрать частотный преобразователь и контроллер. Эти устройства должны иметь функции реверсивного счетчика (для работы с импульсным энкодером), определения координат оси при включении оборудования, аналоговые и цифровые выходы.
Для управления шаговым двигателем могут понадобиться частотные входы “шаг/направление” и “по часовой стрелке/против часовой стрелки”.
Установка, подключение и тестирование энкодеров
Энкодер выбирают, исходя из требований к системе и параметров контроллера и частотного преобразователя. Самым важным критерием выбора этого оборудования является разрешение или количество импульсов, генерируемых за один оборот. Чем больше импульсов передает устройство на котроллер или частотный преобразователь, тем выше точность позиционирования положения вала при низкой скорости. Для точного регулирования при низкой частоте вращения необходимо не менее 20 импульсов на один период квантования контроллера.
При высокой скорости вращения ротора, следует выбрать устройство с разрешением, не превышающем максимальную входную частоту реверсивного счетчика частотного преобразователя или контроллера.
Энкодер крепится к валу двигателя, редуктора или другого передаточного устройства. При его установке важно обеспечить жесткое соединение. Скольжение и люфт снижают точность позиционирования и регулирования.
Запрещается запитывать знкодер от общей шины питания цепи управления. Для этих устройств необходимо предусмотреть отдельный источник стабилизированного напряжения. Интерфейсы Danfoss для подключения энкодеров имеют встроенные источники питания.
Соединение датчика скорости и положения необходимо выполнить экранированными кабелями рекомендуемой производителем марки.
При наладке привода ПК, где установлено соответствующее ПО, соединяют с интегрируемым или внешним контроллером. Далее открывают соответствующий раздел в меню котроллера и частотного преобразователя. Затем определяют тип энкодера, вводят его параметры.
Специализированные частотные преобразователи с интегрируемым контроллером движения имеют функции тестирования датчиков. Предусмотрены разные программы испытаний для ведущего и ведомого энкодеров в системе следящего привода. Программа испытаний:
- Автоматически определяет тип и разрешение датчика.
- Выполняет расчет времени замера ПИД-регулятора.
- Проверяет тип перемещения и выбор времени подсчета количества импульсов.
- Рассчитывает коэффициент прямой связи.
Если энкодер не работает, следует проверить качество контактных соединений. Если подсчет импульсов инкрементального датчика осуществляется в обратную сторону, необходимо поменять кабели, подключенные к каналам A и B и A/ и B/.
Преимущества специализированных преобразователей частоты
При использовании специализированных частотников и интегрируемых и внешних котроллеров, отпадет необходимость производить измерения и расчеты вручную. Эти устройства комплектуют программным обеспечением, позволяющим нивелировать дребезг контактов энкодеров, а также избавляет от необходимости писать программы самостоятельно.
Частотно-регулируемый привод способен выполнять следующие базовые функции:
Определения абсолютной координаты для импульсного энкодера (Home).
- Настройки передаточных отношений и смещений в режиме On-line.
- Синхронизации скорости, положения по метке ведущего и ведомого привода в следящей системе регулирования.
- Приема и передачи данных по поддерживаемым протоколам связи.
- Абсолютного и относительного позиционирования.
- Автоматического вычисления, сравнения данных от датчиков.
- Совместимости с различными типами энкодров, поддержка разных конфигураций системы управления.
- Отладки встроенных программ.
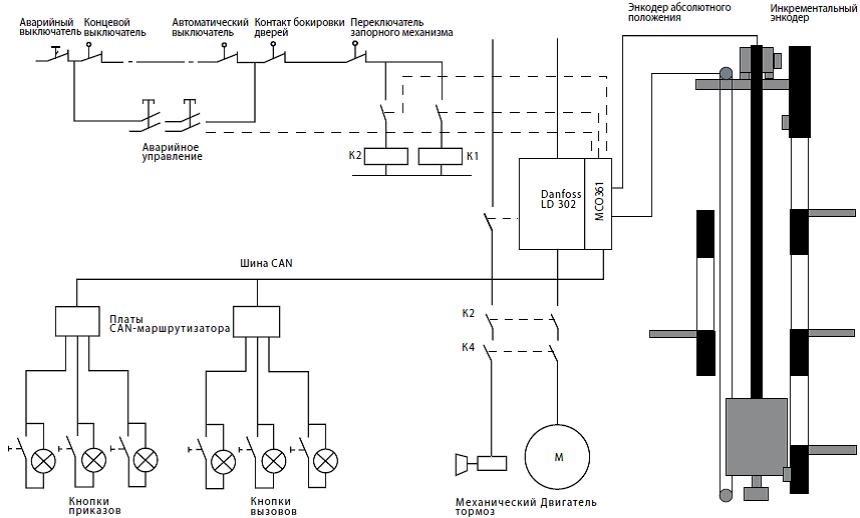
Программирование преобразователей частоты и контроллеров движения осуществляется при помощи ПО, разработанного производителем. Схемы подключения различных типов энкодеров представлены в паспорте электропривода.
Для построения систем точного позиционирования на базе частотных преобразователей и контроллеров Danfoss не требуется глубоких знаний сервотехнологии и навыков написания программ. Эти устройства разработаны по принципу “ все в одном”. Такие приводы широко используются для станков с ЧПУ, кранов, высокоточных дозаторов и другого промышленного оборудования.