

.png)

.png)



.png)

.png)


.png)
Синхронный двигатель – тип электрических машин с равной частотой вращения вала и крутящегося магнитного поля неподвижного узла. За счет относительно сложной конструкции такие двигатели не так распространены, как асинхронные двигатели, однако, в некоторых случаях являются практически незаменимыми.
Рассмотрим конструкцию синхронных электродвигателей, их преимущества и недостатки.
Принцип работы
Принцип действия синхронных электрических машин основан на сцеплении крутящегося магнитного поля статора и постоянного магнитного поля ротора.
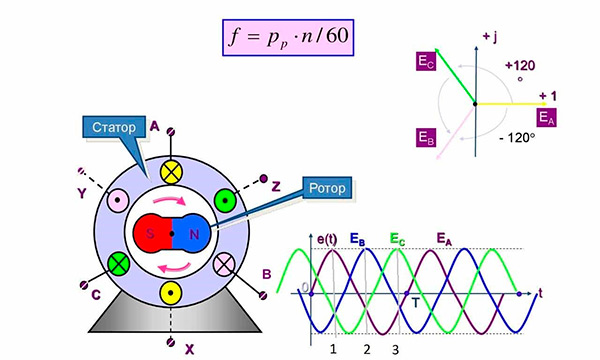
При этом концепция та же, что у асинхронного двигателя: при подаче трехфазного напряжения на обмотки неподвижного узла, сдвинутые на 1200, возникает магнитное поле с попеременно меняющимися полюсами.
При этом на обмотки ротора подается постоянный ток, который наводит постоянное магнитное поле.
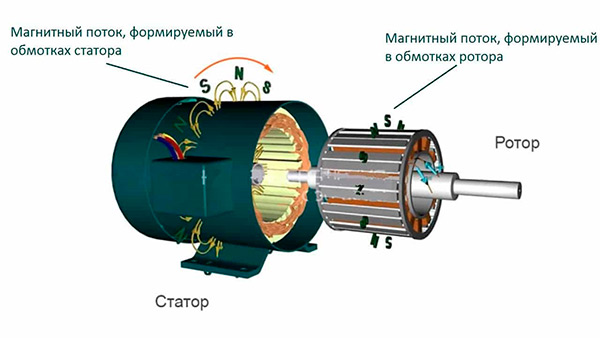
При подаче переменного трехфазного напряжения на статор и постоянного тока на ротор, разноименные полюса магнитного поля ротора будут притягиваться к соответствующим полюсам вращающегося поля статора. При таком взаимодействии возникает крутящий момент, который вращает вал. При этом его скорость будет равна частоте вращающегося магнитного поля, наводимого обмотками неподвижного узла. Наглядно принцип действия синхронных электрических машин представлен на рисунке ниже.
Конструкция и виды синхронных двигателей
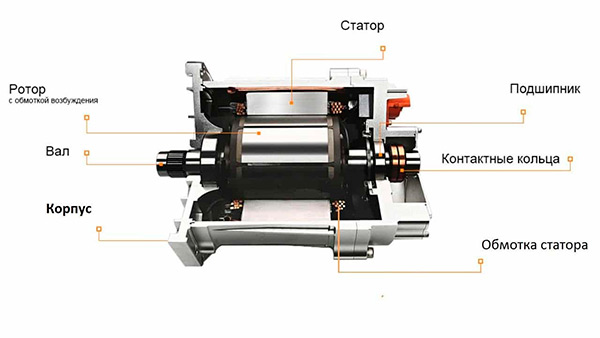
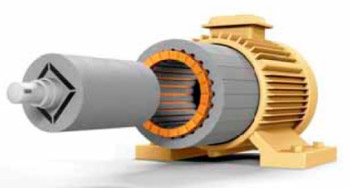
Синхронные двигатели с роторными обмотками – самые распространенные электрические машины такого типа. Силовые агрегаты состоят из следующих основных узлов:
- Станины и корпуса. Элементы конструкции предназначены для размещения других узлов и опоры.
- Статора. Неподвижная часть включает сердечник и трехфазные обмотки переменного тока.
- Ротора. Вращающийся узел состоит из магнитопровода с уложенной в нем обмотки постоянного тока.
- Вала. Элемент конструкции предназначен для подключения механической нагрузки, на нем также размещены катушки возбуждения.
- Контактных колец. Узлы предназначены для подачи постоянного напряжения на обмотки ротора.
Конструкция синхронных двигателей может различаться в зависимости от вида. Например, в электрических машинах типа СДПМ для создания магнитного поля применяют постоянные магниты, такие электродвигатели также не имеют электрических колец. Различают роторы явно и неявнополюсной конструкции. Первые применяют в двигателях приводов низкооборотистого оборудования, работающего при значительной нагрузке.
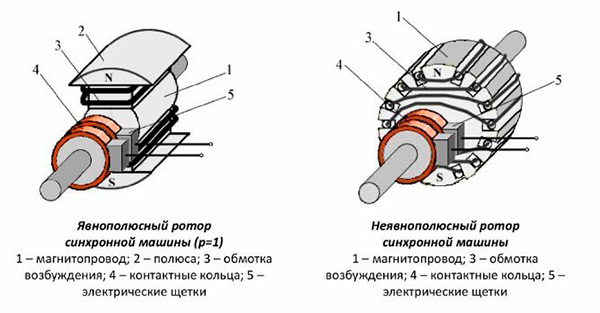
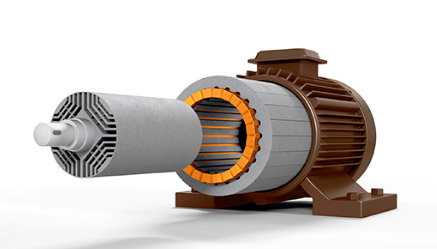
Электродвигатели с неявнополюсным вращающимся узлом используют в скоростных приводах. По конструкции статора различают синхронные электрические машины с распределенной (на рисунке слева) и сосредоточенной обмоткой (на рисунке справа).
В асинхронных двигателях ЭДС вращающегося узла наводится под воздействием магнитного поля статора. Вследствие этого возникает разница между скоростями вращения магнитного поля и ротора, называемая скольжением. Синхронные электрические машины не имеют скольжения, благодаря чему такие двигатели можно применять в приводах точных механизмов.
К преимуществам синхронных двигателей с роторными обмотками также относят высокую перегрузочную способность, увеченный к.п.д (может достигать до 95%), пропорциональную зависимость момента на валу от питающего напряжения, стабильную скорость при переменной нагрузке. К недостаткам синхронных машин относят относительную сложность конструкции, наличие источника постоянного тока для обмотки возбуждения, сложность пусковой схемы.
Способы пуска и возбуждения синхронных двигателей
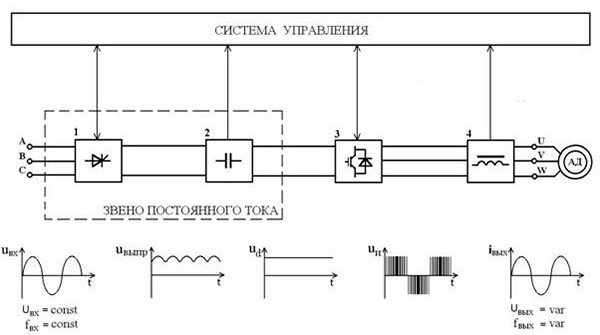
Синхронные машины требуют источник постоянного тока для питания обмотки ротора. Наибольшее распространение получили статические системы возбуждения на базе тиристорных преобразователей. Системы с генератором постоянного тока на валу электродвигателя уже практически не применяют.
Электропитание тиристорных возбудителей осуществляется от трансформатора, включенного в одну сеть с двигателем. Системы позволяют регулировать напряжение, коэффициент мощности, величину реактивной составляющей обмоток статора.
Синхронные электрические машины не могут запускаться прямым включением в сеть, так как смена полюсов вращающегося магнитного поля происходит слишком быстро, из-за инерции разгон ротора до синхронной скорости невозможен.
Существует несколько схем пуска электродвигателей синхронного типа.
Двигательный. Запуск синхронного двигателя осуществляется за счет разгона ротора до синхронной частоты при помощи вспомогательной электрической машины. При этом электродвигатель включается в сеть после достижения синхронной частоты, после чего вспомогательный двигатель останавливают. Двигательные схемы считаются морально устаревшими, из-за высокой стоимости и значительных габаритов и массы их уже практически не применяют.
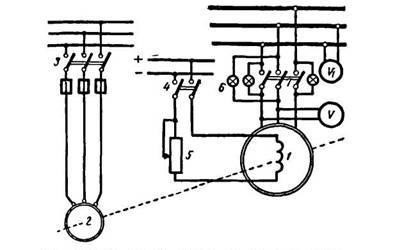
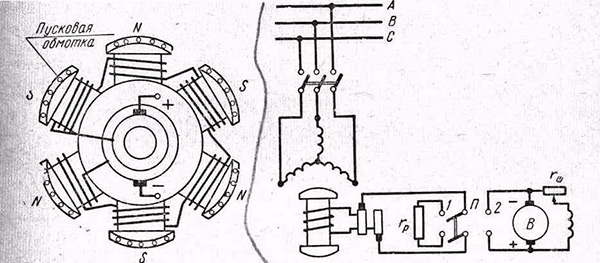
Асинхронный. Синхронные двигатели с асинхронным стартом имеют дополнительную обмотку типа «беличья клетка» на полюсных наконечниках ротора. Пуск электродвигателя осуществляется при отсутствии постоянного тока в обмотке возбуждения, как у асинхронных электрических машин. После разгона до скорости, близкой к синхронной, на роторную катушку подают постоянный ток, двигатель начинает работать в синхронном режиме. Во время старта, до входа в синхронизм, роторную обмотку замыкают на сопротивление, это необходимо для ограничения тока, наводимого полем статора при пуске и разгоне. Такой метод позволяет осуществлять запуск синхронной машины напрямую от сети. К недостаткам относят значительный пусковой ток, затруднение старта под нагрузкой.
Частотный. При этом электродвигатель подключают к частотному преобразователю. Пуск электрической машины осуществляется путем подачи напряжения низкой частоты и плавного ее увеличения до номинального значения, двигатель все время работает в режиме синхронизма. Такой способ позволяет уменьшить время переходных процессов и пусковые токи, снизить тепловые нагрузки, осуществлять пуск синхронных электрических машин под нагрузкой. Недостатком способа является относительно высокая цена специализированного преобразователя частоты. Частотный пуск – наиболее перспективный, он позволяет устранить многие недоставки синхронных электрических машин.
Типы синхронных электродвигателей
Электрические силовые агрегаты с синхронной частотой вращения применяют для решений приводов самого различного назначения: оборудования для инженерных систем и промышленности, бытовых и производственных механизмов. Кроме электрических машин с роторными обмотками, существует еще несколько типов синхронных двигателей. Рассмотрим их типы и конструкцию подробнее.
Двигатели с постоянными магнитами
Конструкция СДПМ напоминает синхронные двигатели с обмотками ротора. Главное отличие – наличие постоянных магнитов на вращающейся части вместо обмоток. Электродвигатели с постоянными магнитами не требуют источника постоянного тока для питания обмотки возбуждения.
Их отличает:
- Упрощенная в сравнении синхронным двигателем с обмотками ротора конструкция.
- Увеличенный к.п.д.
- Улучшенное отношение масса/мощность.
- Возможность точного управления моментом и скоростью.
СДПМ имеют более высокую стоимость, что несколько ограничивает их использование. Область применения электрических машин – приводы средней и малой мощности.
Синхронный реактивный двигатель
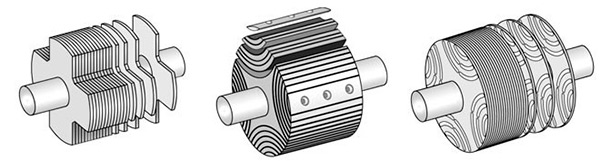
Вращение вала таких электродвигателей осуществляется за счет разности магнитной проводимости ротора в поперечной и продольной плоскости. Чем больше эти значения отличаются, тем выше крутящий момент на валу электрической машины. Конструкция статора реактивных электродвигателей не отличается от стандартных синхронных электрических машин с распределенной или сосредоточенной трехфазной обмоткой.
Варианты конструкции крутящейся части: с явновыраженными полюсами (слева), аксиально-расслоенная (по середине) и поперечно-расслоенная (справа).
Синхронный реактивный двигатель обладает следующими достоинствами:
- Простая конструкция ротора без магнитов и обмоток.
- Небольшой нагрев.
- Низкая инеркцинность.
- Возможность задания скорости в широком диапазоне.
К недостаткам электрических машин относят невысокий коэффициент мощности. Область применения таких двигателей – приводы маломощного оборудования и механизмов.
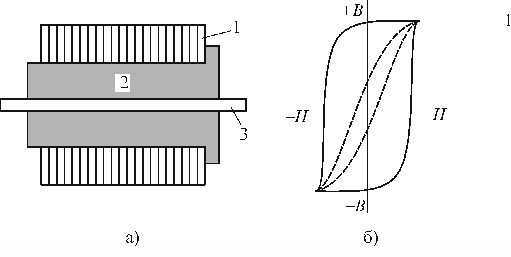
Гистерезисный двигатель
Принцип действия гистерезисных электрических машин основан на явлении гитерезиса магнитовтвердых материлов. Крутящий момент возникает под действием остаточного намагничивания ротора, которое осуществляется магнитным полем статора электродвигателя, в остальном принцип работы электродвиагателей сходен с СДПМ.
Вращающаяся часть гистерезисных двигателей имеет неявнополюсную сборуную конструкцию. К приемуществам электрических машин относятся:
- Простой старт без дополнительной аппаратуры.
- Отсутвие высоких пусковых токов.
- Плавный вход в синхронный режим.
- Простая конструкция.
- Более высокий коэффициент мощности чем у реактивных синхронных двигателей.
К недостаткам относят высокую цену, которая обсуловлена стоимостью магнитотвердых материалов с широкой петлей гистерезиса для ротора.
Реактивно-гистерезисный электродвигатель
Реактивно-гистерезисный двигатели – тип синхронных электрических машин с явнополюсным ротаторном. Пуск осуществляется за счет крутящего момента, возникающего при взаимодействии вращающегося магнитного поля статора и гистерезиса ротора.
Дальнейшая работа двигателя в синхронном режиме – за счет реактивного момента и остаточного намагничивания. Таким образом, двигатели совмещают достоинства реактивных и гистерезисных электрических машин:
- Простота конструкции.
- Самозапуск без дополнительного оборудования.
- Возможность работы от однофазной электросети.
К недостаткам относятся низкие КПД и cosφ. Область применения реактивно-гистерезисных двигателей: микроприводы различного назначения.