

.png)

.png)





.png)


.png)



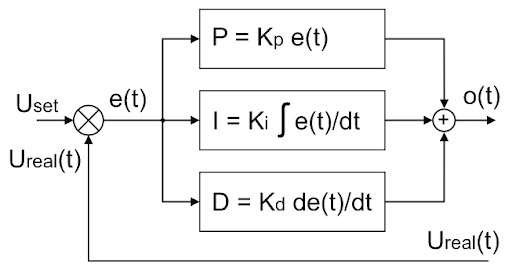
Пропорционально-Интегрально-Дифференциальный регулятор – устройство автоматического регулирования с обратной связью. Управляющий сигнал формируется по пропорционально-интегрально-дифференциальному закону, то есть воздействие представляет собой сумму трех составляющих разности входного сигнала и сигнала обратной связи:
- Пропорциональной.
- Интегральной.
- Дифференциальной (производной).
Структурная схема устройства и формулы каждой составляющей указаны на рисунке.
ПИД-регуляторы относятся к устройствам непрерывного действия, они получили самое широкое распространение в системах автоматического управления. Такие устройства обладают значительным быстродействием, реагируют на тенденции изменения ошибки, а также устойчивы к воздействию шумов.
Настройка ПИД-регулятора сводится к подбору величин 3 коэффициентов, так чтобы устройство поддерживало заданный параметр на определенном уровне.
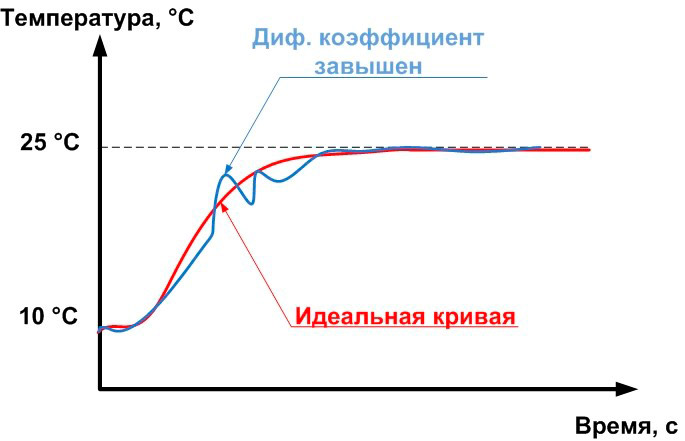
Рассмотрим настройку регулятора температуры. Допустим ее величина на данный момент 10 °С, а требуемое значение должно составлять 25°С.

На графике указаны 2 различных переходных процесса, возникающих при увеличении температуры. Расходящаяся кривая, указанная черным цветом, иллюстрирует работу ненастроенного регулятора. Контролируемая величина не принимает заданного значения, функция «идет вразнос».
Красным цветом указана «идеальная кривая», характеристика достаточно крута, что указывает на небольшое время отклика, величина быстро достигает значения 25°С и удерживается на этом уровне.
Настройка пропорционального коэффициента
Для подбора оптимальной пропорциональной составляющей выставляют нулевые значения интегрального и дифференциального коэффициента. Затем задают величину температуры, отличную от текущей.
Далее через равные промежутки времени вносят полученные переходные величины в таблицу и строят график.

При высоком перерегулировании как на кривой, показанной синим цветом, уменьшают пропорциональную составляющую, при медленном достижении нужного значения температуры, коэффициент увеличивают. Задача – приблизить график к «идеальной кривой», изображенной в красном цвете.
Настройка дифференциального коэффициента
После отладки пропорциональной составляющей настраивают дифференциальный коэффициент. Необходимо достичь отсутствия перерегулирования, которое отображается в виде скачков температуры выше заданного значения. Для этого дифференциальную составляющую плавно повышают.
При наличии скачков в диапазоне ниже верхнего заданного значения контролируемого параметра, дифференциальную составляющую уменьшают. При этом также стоит задача приближения фактического графика к «идеальной кривой».
Настройка интегрального коэффициента
После отладки пропорциональной и дифференциальной составляющей удается получить кривую, очень близкую к идеальной. Однако, температура при этом не достигает заданной величины и поддерживается на более низком значении.
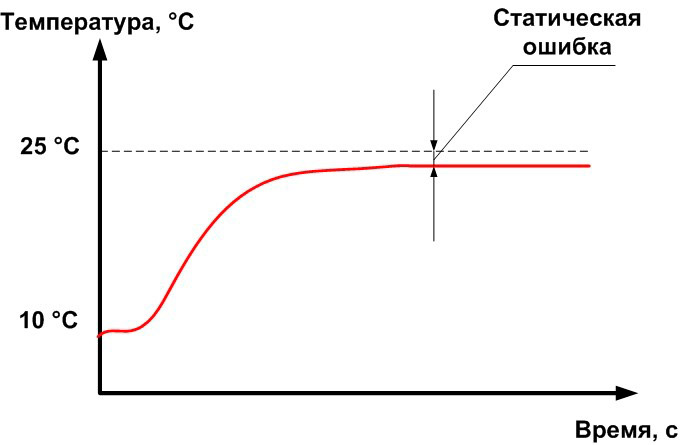
Такое расхождение называют статической ошибкой. Чтобы ее исключить, настраивают интегральную составляющую. Коэффициент плавно увеличивают до исчезновения статической ошибки. При выявлении скачков значений величины контролируемого параметра, интегральную составляющую также плавно снижают.
На практике редко удается достичь настроек близких к идеальным. Любая система подвержена возмущениям извне, что делает невозможным достижение «идеальной кривой». Обычно ограничиваются настройкой, удовлетворяющей условия технологического процесса.
Настройка ПИД-регулятора в преобразователях частоты
Частотные преобразователи – устройства для изменения момента и скорости вращения электродвигателей переменного тока различной конструкции. Современные ПЧ комплектуются функциями ПИ и ПИД-регуляторами. Устройства широко применяют в автоматизированных электроприводах промышленного оборудования различного назначения.
Рассмотрим настройку на примере частотного преобразователя «Данфосс» серии VLT® AutomationDrive FC 360.
Для настройки предусмотрены несколько параметров:
- 7-00. Параметр устанавливает вход для сигнала обратной связи с датчика скорости.
- 7-02. Осуществляет настройку скорости регулирования, при превышении характеристики возможны расходящиеся автоколебания.
- 7-03. Настройка интегральной составляющей, чем меньше ее величина, тем выше скорость реакции. Этим же параметром настраивается величина статической ошибки.
- 7-04. Настраивает дифференциальный коэффициент, отвечающий за регулирование скорости двигателя, пропорционально скорости изменения сигнала обратной связи с датчика. Установка нулевого значения отключает дифференцирующее звено.
- 7-05. Настройка усиления дифференцирующего звена. Регулируя параметр, добиваются приемлемой постоянной времени дифференцирования для разных скоростей изменения контролируемого параметра.
- 7-06. Настройка фильтрации нижних частот для подавления автоколебаний сигнала с датчика скорости. Улучшает характеристики регулятора в установившемся режиме. ПИД-регулятор в ПЧ используется для поддержания постоянной частоты вращения двигателя при изменяющейся нагрузке. Функцию также можно применять для регулирования технологических параметров с обратной связью по сигналу с датчика давления, температуры, расхода и т.д.