

.png)

.png)





.png)


.png)
В автоматике и системах управления часто требуется удерживать параметр на заданном уровне, несмотря на помехи и изменения нагрузки. Для этого используют PID регулятор. В данной статье мы подробно расскажем о том, что такое и как работает ПИД-регулирование.
Что такое ПИД-регулятор
PID-регулирование расшифровывается как Proportional–Integral–Derivative, то есть пропорционально-интегрально-дифференциальное регулирование.
Если говорить простыми словами, то ПИД регулятор – это устройство для автоматического поддержания в заданном интервале одного или нескольких параметров. Такие устройства универсальны, при помощи ПИД-регуляторов можно реализовать любые законы регулирования.
Они учитывают фактическая величину, заданное значение, разность значений и скорость изменения контролируемых характеристик.
Регуляторы такого типа широко применяются в локальных системах управления промышленным оборудованием, централизованных АСУТП, в робототехнике. Устройства позволяют быстро возвращать регулируемый параметр в допустимый интервал, точно удерживать величину и быстро реагировать на возмущающие воздействия.
Составляющие сигнала ПИД-регулятора
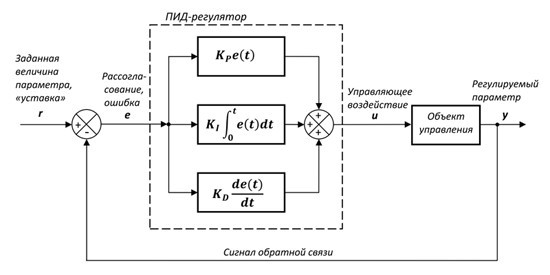
Управляющий сигнал, формируемый ПИД-регулятором, сумма трех составляющих:
- Пропорциональной.
- Интегральной.
- Дифференциальной.
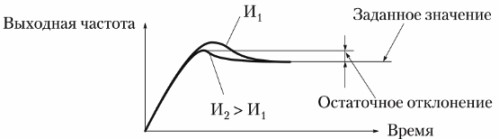
Пропорциональная составляющая формируется исходя из разницы заданной величины параметра и его фактического значения. Чем больше отклонение характеристики, тем выше уровень пропорционального сигнала. Устройство, управляющее системой, только по пропорциональному закону называется Pid-регулятор.
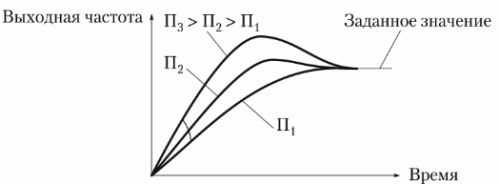
Основной недостаток такого ПИД-регулирования – статическая ошибка, которая указывает на величину остаточного отклонения параметра. Пропорциональные регуляторы имеют ограниченную точность.
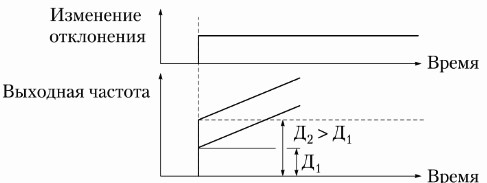
Для ее устранения введена интегральная составляющая. Она пропорциональна интегралу по времени от отклонения величины контролируемой характеристики.
При отклонении параметра, пропорциональная составляющая возвращает его к прежнему значению. Уровень сигнала на выходе стремится к нулю, однако благодаря статической ошибке, регулируемый параметр не достигает заданной величины. Интегральная компонента обеспечивает компенсацию ошибки и позволяет возвращать характеристику к заданным значениям.
Пропорционально-интегральное управление обладает невысоким быстродействием и не подходит для регулирования динамичных систем. Накопление и суммирование ошибок приводит к росту управляющего сигнала. Система может «пойти в разнос».
Для увеличения быстродействия в конструкцию Pid-регулятора введена дифференциальная составляющая. Она увеличивается и уменьшается пропорционально скорости изменения контролируемого параметра.
Таким образом, результирующий сигнал на выходе ПИД-регулятора можно определить из выражения:
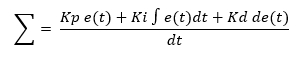
где Kp, Ki, Kd – пропорциональный, интегральный, дифференциальный коэффициенты соответственно, e(t) – ошибка рассогласования.
Настройки ПИД-регулятора
Наладка ПИД-регулятора сводится к определению коэффициентов Kp, Ki, Kd. Компоненты определяются из формулы:
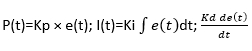
По ним определяются передаточные функции системы автоматического регулирования и вычисляются ее параметры:
- Точность.
- Скорость ПИД-регулирования.
- Форма графиков переходных процессов.
- Инерционность.
- Другие величины и функции.
Математическая модель САР не может дать полного представления о работе системы. Расчеты выполняются для «идеального регулятора». Нелинейность контролируемых параметров, внешние возмущения, помехи на объекте управления не позволяют применять данные расчетов для построения системы автоматического ПИД-регулирования на практике. Результаты математических расчетов используют как вспомогательные данные.
При разработке ПИД-регуляторов и САР используют оборудование, имитирующее изменение контролируемых характеристик, измерительные приборы и ПК. Устройства позволяют определить и анализировать реакцию системы на воздействия и более точно подобрать коэффициенты.
На практике применяется опытный подбор коэффициентов. Pid-регулятор устанавливают на объекте, вводят коэффициенты, полученные при расчете или стендовых испытаниях, настраивают параметры на месте.
Пример применения ПИД-регулятора в частотно-регулируемом приводе насоса
Схемы преобразователей частоты содержат управляющие контроллеры, которые могут обеспечить работу устройства в режиме ПИ или ПИД-регулятора. Специализированные частотники часто уже имеют предустановленные настройки, которые корректируют после установки оборудования.
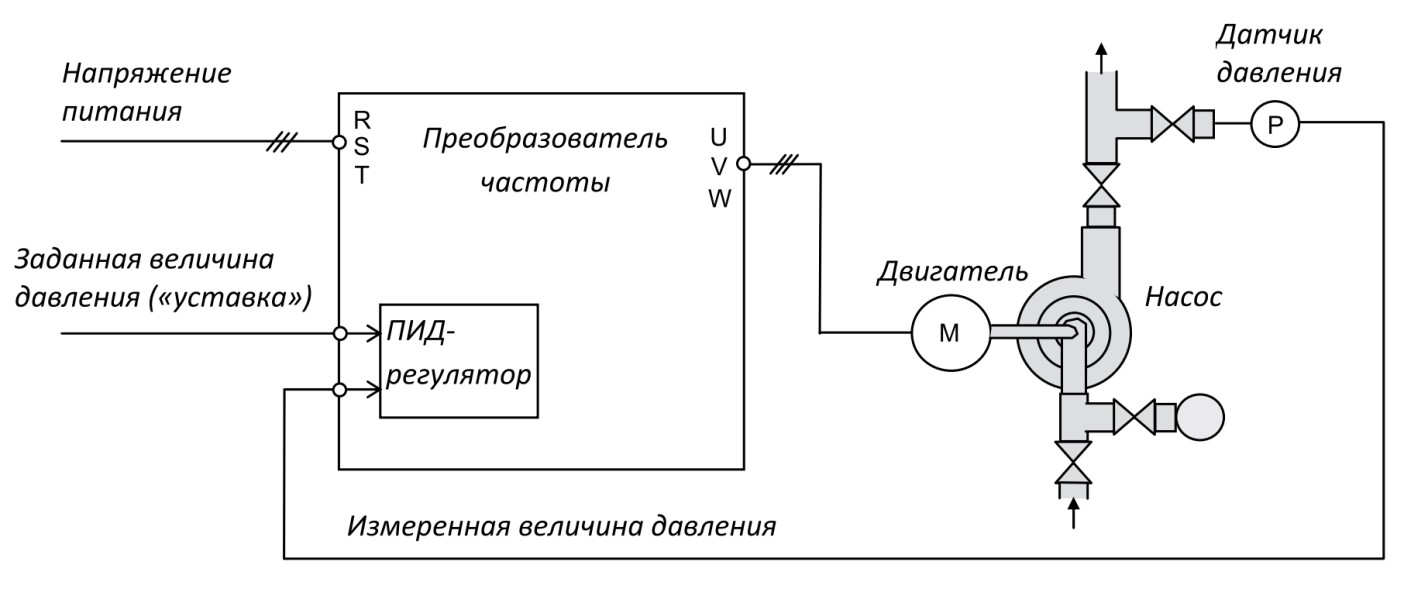
На рисунке представлена простейшая ПИД схема управления насосом по давлению. К аналоговым входам подключены датчик, установленный на напорном трубопроводе, и внешнее задающее устройство. Требуемое значение давления также можно задавать в настройках PID регулятора. При изменении регулируемого параметра на контроллере, сравнивающим сигнал обратной связи с заданным значением, формируется управляющий сигнал.
Преобразователь изменяет производительность насоса путем увеличения или снижения частоты питающего напряжения электродвигателя до тех пор, пока давление в системе не достигнет заданного значения. Таким образом, давление в системе не зависит от расхода.
Приведенная схема сильно упрощена. Частотные преобразователи с ПИД-регулятором могут управлять производительностью по нескольким параметрам. Например, насосы в отопительных системах могут регулироваться по температуре теплоносителя и тепловому режиму на улице и в помещении и давлению.
Преобразователи частоты с функциями ПИД-регулирования применяют также в сложных системах регулирования тягодутьевых систем и других АСУТП.