

.png)

.png)





.png)


.png)



СДПМ или синхронный двигатель с постоянными магнитами – подтип синхронных машин без обмоток возбуждения ротора, их роль выполняют постоянные магниты. Как и у всех синхронных электродвигателей, угловая скорость их ротора равна частоте вращающегося магнитного поля в зазоре между подвижной и неподвижной частью.
Электрические машины такого типа обладают всеми возможностями управления двигателей постоянного тока, а также достоинствами машин переменного тока.
СДПМ:
- Имеют больший КПД. Увеличение коэффициента полезного действия достигается за счет отсутствия потерь на возбуждение, уменьшения смягчения механической характеристики на малых оборотах.
- Обладают улучшенными массогабаритными характеристиками. Асинхронный двигатель существенно больше и тяжелее синхронных двигателей на постоянных магнитах аналогичной мощности и энергоэффективности.
- Имеют более простую конструкцию. СДПМ не имеют обмоток ротора и контактных узлов для передачи постоянного тока на вращающуюся часть.
- Обладают возможностью более точного управления. Синхронные двигатели на постоянных магнитах отличает стабильность характеристик на малых оборотах, сниженная инерция, отсутствие скольжения.
До недавнего времени широкое распространение СДПМ ограничивало отсутствие подходящих материалов для постоянных магнитов. Они должны обеспечивать создание плотного магнитного потока, обладать стойкостью к воздействию неблагоприятных факторов, к размагничиванию во всем диапазоне температур эксплуатации.
С появлением современных магнитных материалов стало возможно производство надежных СДПМ. Синхронные двигатели на постоянных магнитах широко применяют во всех отраслях, особенно в приводах автоматизированного и энергосберегающего оборудования. Рассмотрим конструкцию, способы управления, преимущества электродвигателей такого типа.
Конструкция СДПМ
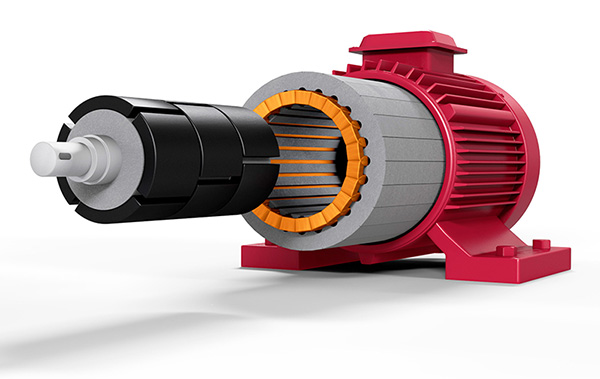
Электрические машины состоят из 2 основных узлов: вращающегося (ротора) и неподвижного (статора).
Ротор расположен внутри статора, исключение – обращенные электродвигатели, где вращающаяся часть расположена снаружи.
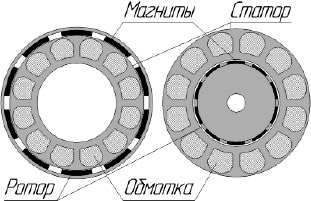
На рисунке выше показана конструкция в разрезе стандартного СДПM (справа) и обращенного двигателя (слева).
По типу ротора различают электрические машины с выступающими и неявно выраженными полюсами. На рисунке ниже показаны варианты конструкции вращающихся узлов с явно и неявно выраженными полюсами.
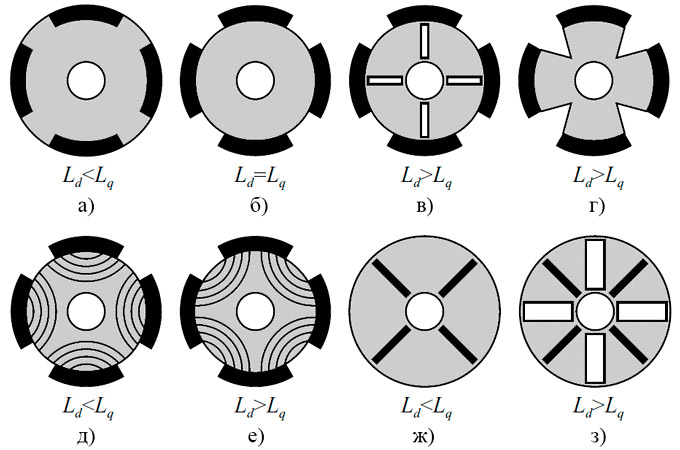
Разница в конструкции – в индуктивности ротора по продольной и поперечной оси. Роторы с явно выраженными полюсами имеют различную продольную и поперечную индуктивность, вращающаяся часть электрических машин с неявно выраженными полюсами – равную индуктивность.
Неявнополюсные двигатели обычно применяют в приводах высокооборотистого оборудования, а также механизмов, где необходимо точное и плавное поддержание скорости во всех предусмотренных диапазонах. Явнополюсные электродвигатели обычно имеют большое количество пар полюсов и применяются там, где необходим большой момент на валу.
Конструкция роторов СДПМ также различается по способу установки магнитов. Их устанавливают на поверхности или встраивают в ротор.

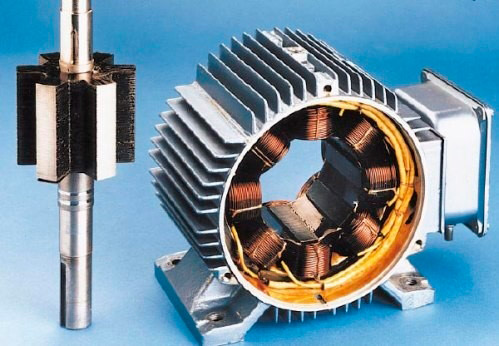
Неподвижная часть двигателя состоит из корпуса и сердечника из электротехнической стали с обмотками. Последние бывают распределенные (слева) и сосредоточенные (справа).
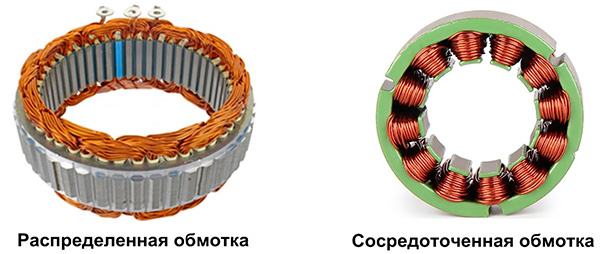
Обычно СДПМ с распределенной обмоткой – машины с синусоидальной обратной ЭДС, с сосредоточенной – с трапецеидальной. На форму кривой ЭДС также влияет конструкция ротора. Вращающаяся часть с явно выраженными полюсами наводит трапецеидальную ЭДС, для ее приближения к форме «синус» полюсные наконечники выполняют скошенными.
Принцип действия и методы управления СДПМ
ринцип действия СДПМ не отличается от стандартных синхронных электрических машин. Вращение ротора осуществляется при сцеплении магнитного поля роторов с крутящимся магнитным полем, наводимым обмотками неподвижной части двигателя. Отличие – в поле вращающегося узла, оно создается не обмотками, на которые подается постоянный ток, а постоянными магнитами. При этом скольжение ротора отсутствует, его скорость равна частоте оборотов магнитного поля статора.
Запуск СДПМ не может осуществляться прямым подключением к электросети, для управления электрической машиной необходим частотный преобразователь или сервосистема. Рассмотрим базовые способы управления приводами на базе синхронных двигателей с постоянными магнитами.
Различают 2 базовых принципа управления электродвигателями такого типа: трапецеидальное (коммутацией обмоток) и синусоидальное (полеорентированное, прямое управление моментом).
Коммутация обмоток СДПМ – наиболее простой метод. За счет простоты схемы такой способ активно применяют в приводах, где не требуется особо точное управление. Различают два способа трапецеидального управления – с обратной связью и без нее. Последний метод практически не применяют в приводах с переменной нагрузкой из-за потери управления.
Регулирование момента и частоты с обратной связью реализовывается при помощи датчиков положения вала или путем вычисления угла поворота вала по уже имеющимся функциям. Такие схемы позволяют организовать достаточно точное управление, однако, обладают некоторыми недостатками:
- Требуют ввода в схему датчиков Холла или применения контроллеров большей вычислительной мощности.
- Не подходят при работе двигателя на малых оборотах.
- Не обеспечивают отсутствие пульсации момента.
Для более требовательных приводов используют полеориентированное управление. Способ позволяет плавно изменять скорость и момент на валу СДПМ. Полеориентированное управление также реализуется на базе индуктивных, оптических, магниторезистивных датчиков положения или вычислительного устройства. В последнем случае положение вала рассчитывается по величине обратной ЭДС.

Бездатчиковый способ подходит только для явнополюсных электрических машин.
Полеориентированное управление применяют в точных электроприводах, требовательных к динамическим параметрам, метод позволяет осуществлять регулирование скорости и момента в большом диапазоне. К недостаткам способа относят относительно высокую стоимость реализации.
Методы управления СДПМ выбирают, исходя из технических задач электропривода и экономической эффективности. Для оборудования с несложными алгоритмами работы обычно выбирают трапецеидальное управление с датчиками обратной связи. Приводы механизмов или устройств, работающих с переменной нагрузкой, высокими требованиями к точности, времени отработки управляющего сигнала, оснащают СДПМ с полеориентированным управлением.
Преимущества приводов на базе СДПМ
Синхронные двигатели на постоянных магнитах обладают управляемостью электрических машин постоянного тока и простотой конструкции асинхронных электродвигателей. Замена традиционно применяемых в ответственных приводах ДПС на СДПМ позволяет:
- Уменьшить затраты времени на проектно-конструкторские разработки.
- Снизить габариты электропривода.
- Отказаться от механических узлов регулирования скорости и момента.
- Уменьшить потребность в запасных частях.
- Упростить доступ к технологическому оборудованию.
- Снизить затраты на электроэнергию.
Применение синхронных силовых агрегатов на постоянных магнитах уменьшает износ фондов производства, простои, связанные с техническим обслуживанием и ремонтом. Преимущества СДПМ особенно заметны в приводах ответственного оборудования, работающего при динамических нагрузках или на низких скоростях. Электрические машины такого типа значительно повышают техническую и экономическую эффективность электроприводов.
Главные направления усовершенствования приводов на основе СДПМ
При всех достоинствах, электродвигатели синхронного типа с постоянными магнитами имеют некоторые недостатки. Один из них – высокая стоимость материалов, которые применяют в производстве магнитов. Цена СДПМ существенно выше асинхронных двигателей и соизмерима с ценой электродвигателей постоянного тока.
Одно из главных направлений усовершенствования синхронных машин с постоянными магнитами – поиск более дешевых материалов для магнитов с подходящими параметрами. То есть, с высоким остаточным намагничиванием, стойкостью к коррозии и размагничиванию во всем интервале эксплуатационных температур.
Кроме того, усовершенствование осуществляется в следующих направлениях:
- Улучшение управляемости в границах диапазона регулирования: применение подсинхронных скоростей вращения.
- Уменьшение потребляемой мощности: автоматическая подача размагничивающих токов.
- Оптимизация алгоритмов контроллеров, что позволит удешевить схему управления.
- Снижение чувствительности к помехам на малых оборотах при полеориентированном управлении без датчиков.
- Расширение возможностей СДПМ для применения в высокоточных сервоприводах путем разработки специализированных контроллеров для управления двигателями на постоянных магнитах.
- Устранение пульсаций момента на небольших скоростях.
СДПМ – современные, энергоэффективные электрические машины. Основные области их применения: микроприводы, приводы средней мощности, однако, уже есть разработки электродвигателей на постоянных магнитах более 1 МВт.
СДПМ – перспективная замена коллекторных двигателей постоянного тока в приводах оборудования, работающего динамическом режиме, а также механизмов, требовательных к точности регулирования скорости, момента или положения вала. Синхронные двигатели на постоянных магнитах также в отдельных случаях предпочтительней асинхронных двигателей с короткозамкнутым и фазным ротором.