

.png)

.png)



.png)

.png)


.png)
Значительная доля всей генерируемой в мире электроэнергии потребляется двигателями переменного тока. Управление частотой питающего напряжения и тока позволяет снизить энергопотребление на 40-70%, а также повысить КПД и увеличить производительность оборудования.
Правильно подобрать способ управления – одна из главных задач проектировщика, правильное ее решение обеспечивает максимальный технико-экономический эффект. Рассмотрим достоинства и недостатки скалярного управления.
Способы управления
Наибольшее распространение в электроприводах двигателей до 1 кВ получили преобразователи частоты со звеном постоянного тока. Регулирование частоты напряжения в таких устройствах достигается изменением циклов отпирания/запирания транзиторных ключей путем изменения длительности управляющих импульсов широтно-импульсного модулятора ШИМ.
Различают 2 способа управления:
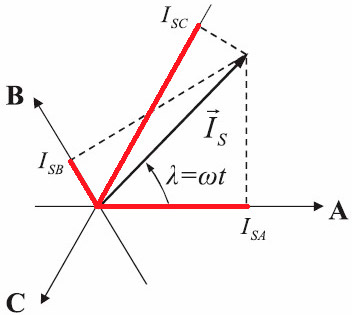
- Векторный.
- Скалярный.
Первый метод заключается в поддержании отношения величины, частоты и фазы напряжения питания двигателя. Такой способ позволяет регулировать скорость вращения вала в широком диапазоне, управлять моментом, обеспечивать жесткость механических характеристик во всем интервале частот, осуществлять пуск со значительной нагрузкой.
Однако, такой метод имеет свои недостатки. Главный из них – значительная вычислительная сложность. Векторные преобразователи частоты комплектуются высокопроизводительными контроллерами, что ведет к значительному удорожанию ПЧ. Такое оборудование используется в приводах механизмов с динамической нагрузкой, грузоподъемных устройств, точных механизмов и т.д.
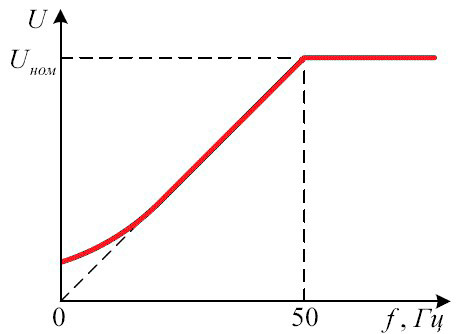
Принцип скалярного или вольт-частотного управления заключается в поддержании постоянного числа U/f (скалярной величины и частоты напряжения питания) при любой угловой частоте вращения вала. При этом контролируется только величина и фаза напряжения на выходе частотного преобразователя. Рассмотрим принцип и виды скалярного регулирования подробнее.
Виды скалярного управления
Поддержание постоянной величины U/f обеспечивает относительно постоянный магнитный поток в зазоре двигателя. Если отношение напряжение/частота растет, электродвигатель переходит в перевозбужденное состояние, если снижается – электрическая машина приходит в невозбужденном состоянии.
Отношение U/f вычисляется из номинальных величин напряжения и частоты двигателя, фаза при этом не учитывается, таким образом, вычислительная сложность для устройства управления ШИМ не велика. Скалярные ПЧ комплектуют простыми контроллерами.
Различают 2 метода скалярного управления:
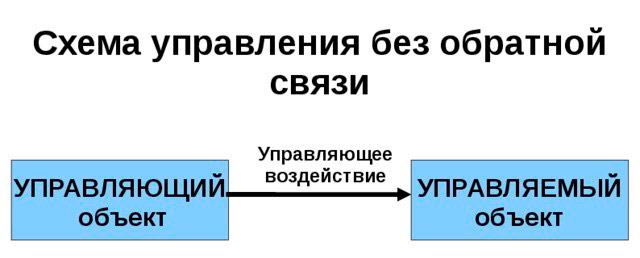
- Без обратной связи.
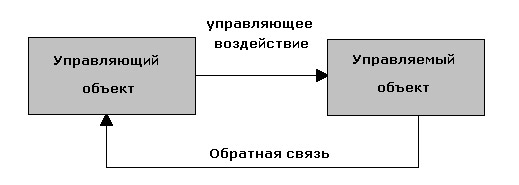
- С обратной связью по скорости вала.
Вольт-частотный способ без обратной связи широко применяется в схемах управления асинхронными электродвигателями, в приводе оборудования, работающего с постоянной нагрузкой.
Благодаря простой конструкции без датчиков обратной связи, невысоких требований к вычислительной способности управляющего блока, относительной низкой стоимости, такие ПЧ массово используется в несложных электроприводах. Скалярный метод позволяет реализовать групповое управление однотипными электродвигателями с одновременным пуском и остановкой.
Вольт-частотный способ управления с энкодером (датчиком оборотов или скорости) позволяет существенно расширить возможности метода. При этом величина U/f поддерживается при различных скоростях.
При возрастании угловой частоты вращения вала, напряжение на обмотках статора двигателя также должно увеличиваться. Однако, в асинхронных электрических машинах частота вращения магнитного поля статора не совпадает со скоростью вала. Скольжение при этом зависит от нагрузки. Для компенсации скольжения в схему электропривода добавляют датчик скорости или энкодер. Обратная связь позволяет повысить точность поддержания скорости до 0,03%. Таким образом, скалярное управления с энкодером позволяет устранить недостаточную точность регулирования угловой частоты вала.
К недостаткам метода относятся усложнение схемы, необходимость монтажа и настройки энкодера.
Преимущества и недоставки скалярного способа управления
Главное достоинство вольт-частотных ПЧ – простота и невысокая стоимость. Цена такого оборудования значительно меньше векторных преобразователей частоты. В схемах управления не нужно устанавливать датчик скорости на вал. Настройка скалярного преобразователя частоты также намного проще. Такие устройства также позволяют управлять несколькими электродвигателями.
Один из недостатков вольт-частотного управления – зависимость скорости вала от нагрузки. Без обратной скорости невозможно компенсировать скольжение ротора. Такое оборудование также не позволяет управлять частотой вращения и моментом на валу одновременно. Скалярные частотные преобразователи также не обладают высокой перегрузочной способностью. Еще один существенный недостаток – потеря жесткости механических характеристик на небольших скоростях.
Сфера применения
Несмотря на совершенствование векторного способа управления, скалярные частотные преобразователи по-прежнему широко используются. Область применение таких ПЧ – электроприводы различного назначения с постоянной или изменяющейся по известному закону нагрузкой.
Применение вольт-частотных преобразователей в вентиляционном и насосном оборудовании позволяет:
- Осуществлять управление потоком воздуха или давлением и расходом жидкостей без механических заслонок и задвижек.
- Осуществлять плавный пуск и остановку без риска гидравлических ударов в системе.
- Автоматически пропускать резонансные частоты при управлении воздухообменными установками.

При помощи скалярных преобразователей можно задать режимы работы насосного или воздуходувного оборудования по известным законам регулирования.
Установка ПЧ в приводе станков:
- Существенно упрощает кинематическую схему, частотное управление позволяет отказаться от передаточных механизмов.
- Увеличивает точность обработки, при точном задании скорости существенно снижется количество брака.
Преобразователи частоты снижают стоимость производства путем снижения расходов на электроэнергию.
ПЧ также устанавливают на двигатели конвейеров и других механизмов подачи. Это позволяет:
- Точно задавать скорость перемещения под конкретные технологические процессы.
- Осуществлять остановку при возникновении аварий.
- Исключить удары и рывки при пуске, работе и остановке.
Преобразователи частоты снижают износ механических узлов конвейерного оборудования, а также позволяют задавать режимы автоматического управления в зависимости от специфики производственных процессов.
Заключение
Выбор метода управления осуществляется на основании технических требований и экономических расчетов. Недорогие скалярные частотные преобразователи применяются в двигателях оборудования с постоянной нагрузкой, невысокими требованиями к перегрузочной способности, при отсутствии необходимости одновременной регулировки скорости и момента, а также точного регулирования скорости при оборотах ниже номинального значения.
Векторные преобразователи используют в приводах оборудования с высокодинамичной нагрузкой, при необходимости точного позиционирования, пуска с высоким моментом и в других сложных условиях.