

.png)

.png)





.png)


.png)



Асинхронные электродвигатели – самые распространенные электрические машины, применяемые в приводах промышленного и бытового оборудования. Главные их достоинства: относительно небольшая масса при высокой мощности, простая конструкция, низкая цена.
Рассмотрим способы регулирования частоты вращения ротора асинхронных двигателей. Теоретически скорость вала можно разгуливать несколькими способами:
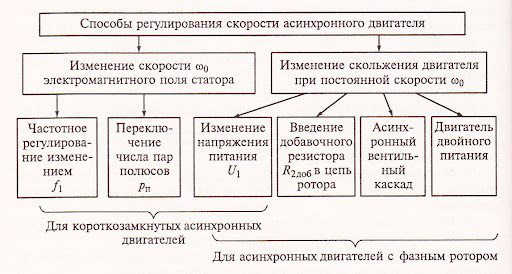
На практике чаще всего используют 2 метода:
- Изменение числа полюсов статора.
- Регулирование напряжения на обмотках статора или ротора.
- Изменение частоты питающего напряжения.
Для регулировки скорости асинхронных электрических машин также применяют механические редукторы. Рассмотрим устройство асинхронного электродвигателя и преимущества и недостатки каждого метода изменения частоты вращения.
Устройство асинхронного электродвигателя
Различают 2 основных типа асинхронных электрических машин с фазным и короткозамкнутым ротором. Конструкция последних показана на рисунке:
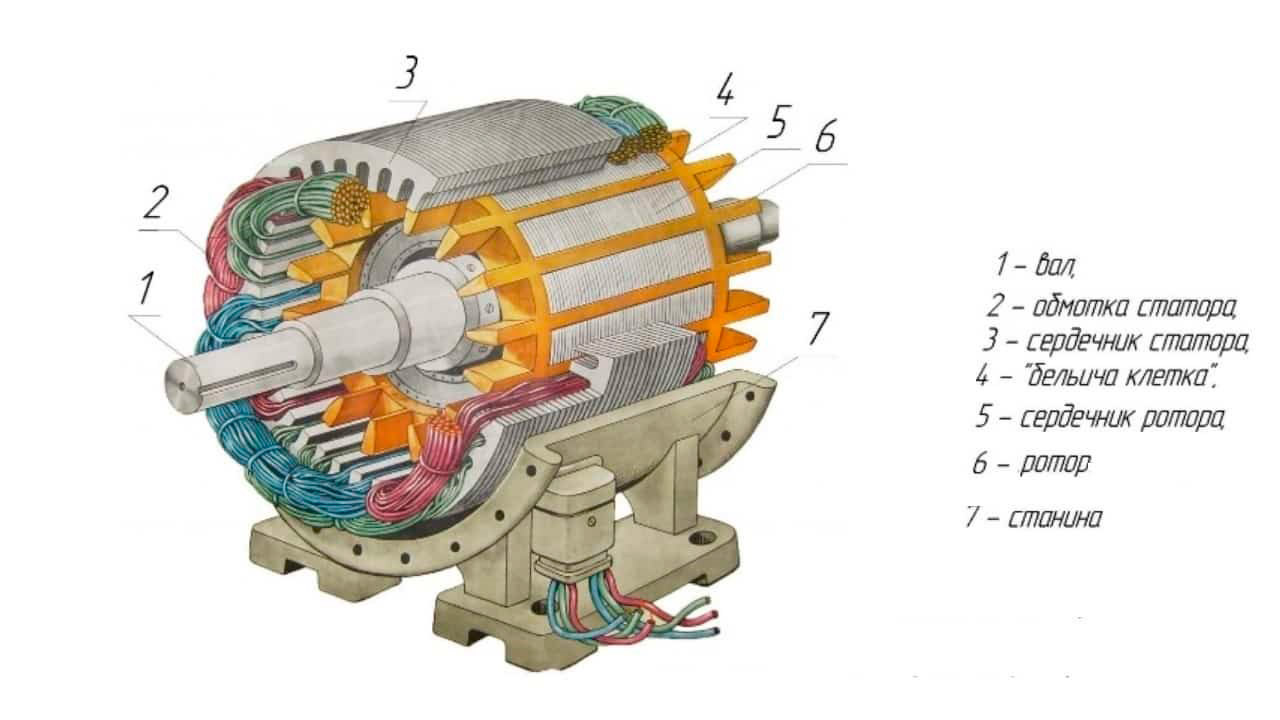
Двигатель состоит из вращающегося ротора, неподвижного статора, корпуса и станины. В статор уложена трехфазная обмотка с угловым расстоянием 120 °, соединенная по схеме «звезда» или «треугольник».
Конструкция ротора – так называемая «беличья клетка» состоит из стержней загнутых между 2 кольцами.
При подаче напряжения на обмотки статора возникает магнитное поле, которое наводит ток во вращающейся части, при взаимодействии полей ротор начинает вращаться в ту же сторону, что и магнитное поле статора. Частота вращения подвижной части несколько отстает от скорости вращения поля, эта разность называется скольжением.
Электрические машины с фазным ротором отличаются конструкций вращающейся части. В ней уложена трехфазная обмотка, соединенная по схеме «звезда» и подключенная к регулировочному реостату. Таким образом, ток в ней можно регулировать, изменяя частоту вращения и момент.
Конструкция двигателей с фазным ротором более сложная, к преимуществам таких электрических машин относят улучшенные пусковые характеристики.
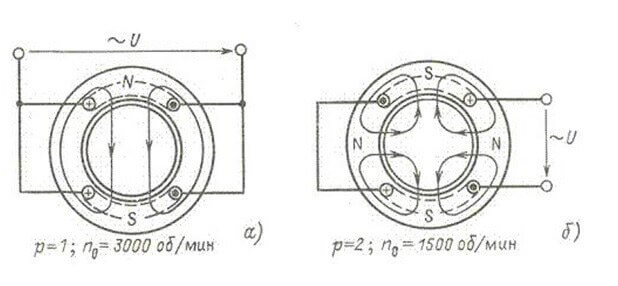
Методы регулирования частоты вращения изменением числа пар полюсов и напряжения на обмотках
Частота вращения вала асинхронных двигателей определяется из формулы: n = 60f / p, где f – частота напряжения сети Гц, р – число пар полюсов статора. Таким образом, подавая напряжение на разные секции обмоток, можно изменять количество подключенных пар полюсов и регулировать скорость двигателя. К недостаткам такого метода относятся усложнение конструкции. Кроме того, регулировать скорость можно только ступенчато на число, кратное количеству пар полюсов.
Еще один метод изменения скорости двигателя – регулировка величины питающего напряжения. Он непригоден для асинхронных двигателей с коротко-замкнутым ротором, так как при снижении напряжения на обмотках статора значительно снижает жесткость механических характеристик.
Область применения такого способа – приводы с асинхронными двигателями с фазным ротором. Для регулирования напряжения в цепь ободок вращающейся части вводится реостат. Таким образом, можно плавно изменять скорость вращения вала до синхронной частоты 3000 об/мин.
К недостаткам относят значительную потерю напряжения на резистивном элементе, недостаточную эффективность при небольшой нагрузке.
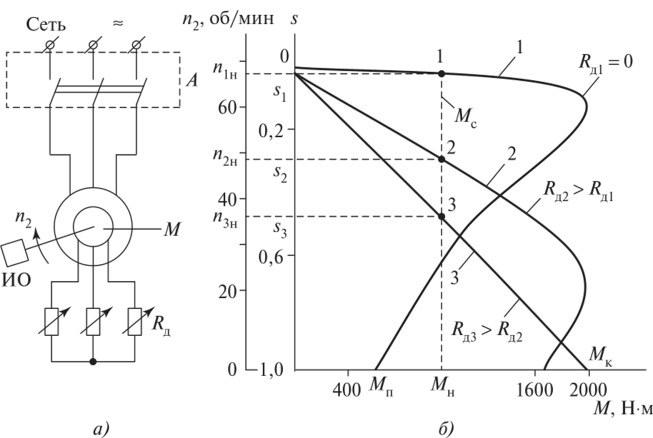
Механические характеристики при этом также ухудшаются.
Частотное регулирование скорости асинхронных двигателей
Скоростью вращения асинхронных двигателей также можно управлять путем изменения частоты питающего напряжения. С появлением быстро переключаемых транзисторов и тиристоров стало возможным применять электронные инверторы для изменения частоты напряжения, подаваемого на статор.
Такой метод лишен всех недостатков управления напряжением и обладает следующими преимуществами:
- Сохранение жесткости характеристик на любой скорости независимо от нагрузки.
- Плавное, бесступенчатое изменение скорости вращения.
- Возможность регулировки вверх и вниз от синхронной скорости.
- Небольшие габариты и масса.
Частотные преобразователи не требуют изменения конструкции электродвигателей. Они могут применяться для всех типов электрических машин переменного тока с фазным или короткозамкнутым ротором.
Различают несколько типов ПЧ и методов частотного управления. Рассмотрим наиболее распространенные типы и способы.
Виды преобразователей частоты
Одна из самых первых схем частотных преобразователей – устройства с непосредственной связью с сетью. ПЧ такого типа имеют гальваническую связь с электросетью и обычно построены на базе быстропереключаемых тиристоров. Полупроводниковые элементы включены по мостовым, перекрестным, нулевым и встречно-параллельным схемам.
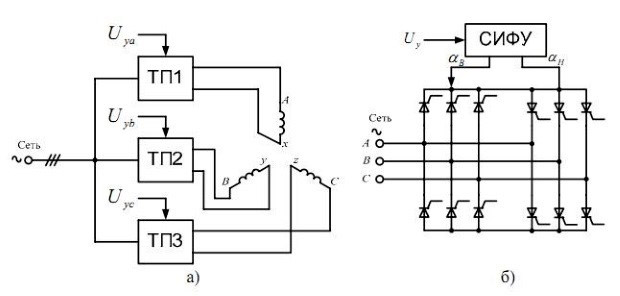
Устройства с непосредственной связью обеспечивают стабильную работу на малых скоростях двигателей, обладают высоким КПД. Преобразователи также могут обеспечивать возврат электроэнергии в сеть в режиме торможения двигателей. При необходимости мощность устройств возможно увеличить путем подключения дополнительных блоков. К недостаткам устройств относятся: несинусоидальная форма напряжения, возможность регулирования скорости только в меньшую сторону, относительная сложность схемы управления.
Наиболее распространенные в низковольтном приводе преобразователи частоты выполнены на базе схемы двойного преобразования с явно выраженным звеном постоянного тока.
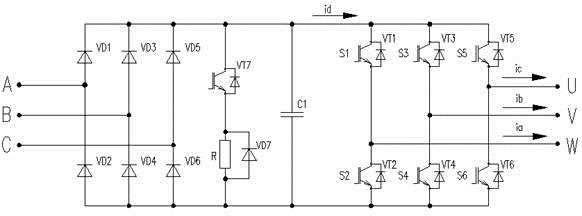
Силовая часть схемы состоит:
- Из диодного трехфазного выпрямителя. Блок обеспечивает преобразование переменного тока в постоянный.
- Из звена постоянного тока. Емкостной элемент обеспечивает фильтрацию постоянной составляющей и сглаживание пульсаций, возникающих при работе инвертора.
- Из инвертора. Функциональный блок на быстропереключаемых транзисторах преобразовывает постоянное напряжение в переменное. Частота задается алгоритмом открытия/ закрытия полупроводниковых элементов и определяется широтно-импульсным модулятором.
Схемы двойного преобразования обеспечивают чистую синусоидальную форму напряжения на выходе, позволяют управлять скоростью выше и ниже синхронной частоты, обеспечивают жесткость характеристик во всем диапазоне. К недостаткам относят некоторую потерю мощности за счет двойного преобразования электроэнергии, сложность конструкции, относительно высокую стоимость.
Заключение
Управление скоростью вращения вала частотой питающего напряжения статора – самый эффективный способ. Преобразователи частоты:
- Уменьшают пусковые токи.
- Существенно сокращают потребление электроэнергии.
- Позволяют регулировать момент при динамической нагрузке.
- Плавно регулируют частоту вращения вала в широком диапазоне.
Устройства также обеспечивают защиту от перекоса фаз, перегрузки, коротких замыканий и перепадов напряжения. Современные ПЧ также позволяют реализовать любой закон автоматического регулирования, осуществлять удаленное управление, вести журнал событий и многое другое.