

.png)

.png)



.png)

.png)


.png)
Основные функции любого преобразователя частоты – пуск, остановка, регулирование скорости вращения вала электродвигателя. Подача управляющих команд может осуществляться со встроенных или внешних устройств:
- Непосредственно со съемной или встроенной панели управления ПЧ.
- Выносного пульта управления.
- Аналоговых входов.
- Цифровые входов.
- Интерфейса промышленной связи.
Рассмотрим, как управлять частотным преобразователем, какие способы регулирования скорости и момента позволяет реализовать ПЧ.
Управление с панели ПЧ и выносного пульта
Преобразователи частоты оснащены съемной или несъемной панелью управления. В первом случае устройство можно использовать как выносной пульт.
Съемная панель подключается патчкорд-кабелем длиной до 15 м. На ней расположены:
- Индикаторное устройство для отображения параметров и единиц измерения: Гц, В, А, об/мин, %.
- Сигнализатор состояния двигателя: прямое вращение, реверс и остановка.
- Кнопка «Меню» для вызова и закрытия каталога настроек и функций.
- Кнопки «Пуск» и Старт/Сброс» для запуска, остановки двигателя, сброса аварийного сигнала.
- Кнопки «Вверх» и «Вниз» для установки величин параметров.
- Кнопка «Ввод» для сохранения выбранного значения.
- Кнопки «Влево», «Вправо», «Ок» для переключения параметров и подтверждения.
- Потенциометр для регулировки значений.
- Кнопка с настраиваемой функцией.
С панели можно задавать настройки, осуществлять пуск и останов соответствующими кнопками, регулировать скорость вала клавишами «Вверх», «Вниз» и вращением потенциометра.
Пульт дистанционного управления дублирует функции панели ПЧ, при помощи устройств также можно выполнять настройки, запускать и останавливать двигатель, регулировать скорость вращения, осуществлять контроль параметров.
Управление через аналоговые входы
Аналоговое управление – это задание частоты вращения вала двигателя путем подачи унифицированных сигналов постоянного напряжения 0-10 В или тока 0-20 мА.
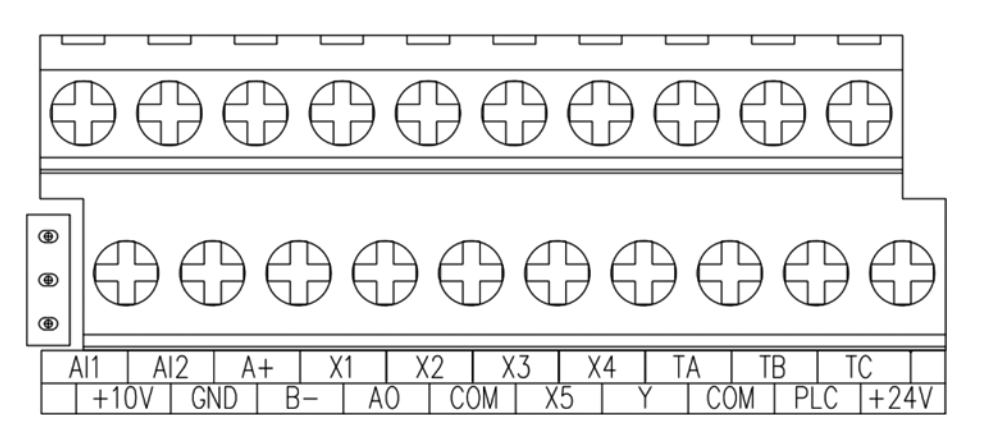
Преобразователь частоты VEDA VFD VF-101 имеет несколько аналоговых входов:
- AI1-GND.
- AI2-GND.
К клеммам подключают внешние потенциометры, датчики, регуляторы с аналоговым выходным сигналом тока и напряжения. С этих клемм можно осуществлять регулирование скорости двигателя в удаленном или автоматическом режиме.
Управление через дискретный вход частотного преобразователя
Управление ПЧ также возможно также через дискретные (цифровые входы). Параметры клемм - логическая единица – 10-30 В, логический ноль – 0-5 В, комплексное сопротивление - 1,5-6,3 кОм.
Частотные преобразователи VEDA VFD VF-101 имеют несколько таких входов:
- Х1-GND/COM.
- Х2-GND/COM
- Х3-GND/COM.
- Х4-GND/COM.
- Х5-GND/COM.
- Х5/PUL-GND
Цифровые входы многофункциональны, их назначение задается в настройках. Возможные конфигурации: запуск привода и регулировка скорости цифровым потенциометром, многоскоростное управления, старт и остановка, ступенчатое регулирование частоты с внешней кнопочной станции и т.д.
Управление через последовательный интерфейс
Для подключения контроллера, панели оператора или персонального компьютера в преобразователе частоты предусмотрены клеммы «А+» и «B-». По интерфейсу связи RS485 можно осуществлять управление пуском, остановкой, скоростью электродвигателя, получать данные о величинах текущих параметров, состоянии элементов электропривода, осуществлять координацию с другими преобразователями частоты.
Способы оперативного управления преобразователем частоты
Частотно-регулируемые электроприводы позволяют управлять стартом, остановкой, реверсом, скоростью вращения.
Запуск и остановка может осуществляется:
- С панели управления ПЧ при помощи кнопок «Пуск» и Старт/Сброс».
- Дискретным переключателем, подключенным к цифровому входу «Х1-GND/COM».
- Через интерфейс связи RS485 (вход «А+» и «B-»).
Реверс осуществляется отдельным внешним коммутационным устройством, подключенным к дискретному входу «Х2-GND/COM».
Управление частотой выходного напряжения преобразователя частоты, задающей скорость вращения двигателя, осуществляется:
- Потенциометром панели управления.
- Кнопками «Вверх/Вниз» на встроенном или выносном пульте.
- Внешними кнопками или тумблерами через дискретные входы Х1, Х2, Х3, Х4, Х5-GND/COM.
- Внешним потенциометром или датчиком по аналоговым входам AI1-GND, AI2-GND.
- Контроллером, компьютером или панелью оператора по последовательному интерфейсу RS485 (клеммы «А+» и «B-»).
Таким образом, управление частотным преобразователем может осуществляться непосредственно по месту, с удаленного диспетчерского рабочего места или в автоматическом режиме. В последнем случае управление осуществляется векторным и скалярным методом. Рассмотрим оба способа подробнее.
Векторный и скалярный метод управления ПЧ
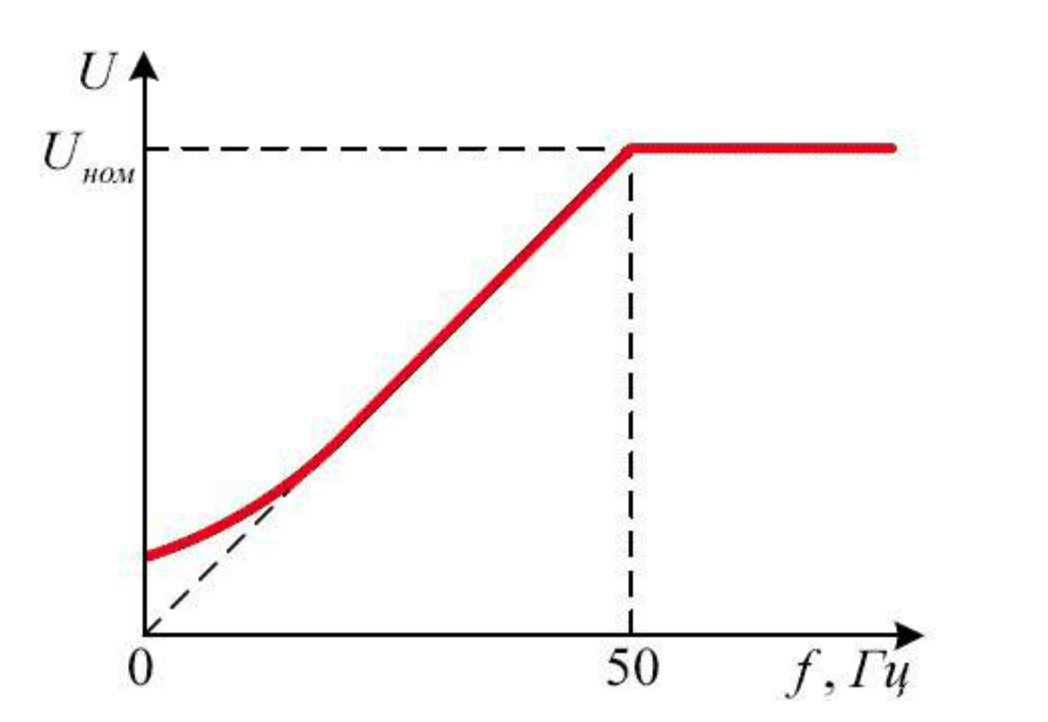
Существуют 2 способа управления частотно-регулируемым приводом – контроль величин частоты и напряжения (скалярный способ) и контроль фазы, частоты и амплитуды (векторный метод).
Первый способ состоит в поддержке постоянного магнитного потока (функция (U/f)) между ротором и статорам электродвигателя при различных скоростях вращения вала. Те есть, во всем диапазоне регулирования угловой частоты обеспечивается неизменный момент. При этом амплитуда напряжения регулируется в функции частоты, при скалярном способе поддерживается постоянная величина U/f. Момент на валу определяется фактической нагрузкой, при этом угловая частота вращения вала зависит от скольжения.
Скалярный методы может быть реализован без датчиков положения и скорости ротора, тока и напряжения. Основные достоинства такого способа – простота технической реализации и дешевизна аппаратной части. Управление осуществляется по простым алгоритмам, для реализации схемы не нужен процессор значительный вычислительной мощности и дополнительные устройства.
Скалярный метод широко применяется:
- Для управления группой двигателей одним частотным преобразователем.
- Для приводов, не требующих быстрой реакции на управляющее воздействие.
- Для управления механизмами с постоянной нагрузкой.
Скалярные преобразователи частоты широко используют в приводах насосного оборудования, вентиляторов, компрессоров, обрабатывающих станков и другого оборудования с неизменной или с относительно медленно изменяющейся нагрузкой.
При увеличении отношения напряжение/частота, двигатель работает в режиме перевозбуждения, с опережающей реактивной составляющей тока, при снижении U/f электрическая машина функционирует в режиме недовозбуждения. Таким образом, механическая характеристика на малых скоростях становится «мягкой».
К другим недостаткам скалярного метода относят невозможность регулировать одновременно момент и скорость, уменьшение перегрузочной способности, относительно высокое энергопотребление на низких частотах.
Для частичного устранения недостатков скалярного способа в схемы вводят датчики угловой частоты вращения вал. По сигналу обратной связи автоматически корректируется отношение (U/f). Это позволяет увеличить точность регулирования скорости путем компенсации скольжения, повысить быстродействие. Однако, схемы скалярного управления с обратной связью имеют более сложную конструкцию и высокую стоимость.
Более подробно скалярный метод управления преобразователем частоты описан в этой статье.
Векторный способ основан на контроле фазы, частоты и амплитуды выходного напряжения. При этом учитывается не только скалярная величина отношения U/f, но и вектор фазы. Метод позволяет:
- Существенно уменьшить погрешность регулирования скорости за счет компенсации скольжения.
- Обеспечить практически мгновенную реакцию на изменение нагрузки.
- Увеличить интервал изменения скорости электродвигателя до 1:200.
- Повысить кпд привода за счет снижения потерь на намагничивание и нагрев, особенно на малых скоростях.
- Управлять моментом и угловой частотой вращения вала одновременно.
Способ векторного управления также обеспечивает жесткую механическую характеристику двигателя на малых скоростях, что требуется в приводе лифтов и грузоподъемного оборудования.
Самая простая схема векторного электропривода – без датчика обратной связи. При этом момент оценивается по мгновенным значениям токов обмоток двигателя в режиме реального времени и предустановленным параметрам. Регулирование без обратной связи подходит для большинства промышленных электроприводов, работающих с нагрузкой, которая изменяется по известному закону. Для регулирования скорости и момента требуются точные параметры электропривода, которые не всегда известны. Векторный метод без обратной связи используется при допустимой погрешности скорости до 1,5% в диапазоне регулирования – до 1:100.
В более точных приводах в схемы вводят датчики скорости или положения вала. Обратная связь позволяет регулировать потокосцепление и скорость вала по фактическим величинам. Схемы с обратной связью позволяют развивать значительный момент на скоростях, близких к нулю, что требуется при работе грузоподъемного оборудования и лифтов. Наличие датчика позволяет сократить погрешность регулирования ± 0,2% и увеличить интервал изменения угловой частоты вращения вала до 1:1500 и более. Еще одна особенность векторного управления с обратной связью – возможность работы с оборудованием с переменной нагрузкой. Например, мотальные машины автоматически регулируют натяжение нити или проволоки по мере наматывания или разматывания бобины.
Кроме наличия обратной связи, векторный метод различают по способу реализации:
- Полеориентированное управление. Метод можно использовать как для асинхронных двигателей с короткозамкнутым ротором, так и для синхронных машин. Главная особенность такого способа – независимый контроль поля и момента. Полеориентированное управление может быть реализовано как с датчиком положения ротора, так и по схеме без обратной связи.
- Прямое управление моментом. Регулирование достигается пространственно-векторной модуляцией магнитного потока или напряжения. Схема реализации такого метода несколько проще полеориентированного способа, однако, обладает рядом недостатков: значительной пульсацией момента и высоким уровнем помех из-за переменной частоты переключения электронных ключей.
Кроме перечисленных способов векторное управление реализовывается по схемам прямого управления с таблицей включений и самоуправлением. Такие способы используют в высокодинамичных приводах или для управления электродвигателями большой мощности.
Кроме преимуществ, векторный метод имеет свои недостатки. К ним относят:
- Относительно высокую цену. Стоимость векторных преобразователей частоты обусловлена значительной вычислительной мощностью процессора, необходимого для оценки текущих характеристик.
- Большое количество параметров. Для реализации сложных алгоритмов управления требуется определить и ввести значительное количество данных, необходимых для расчета работы привода в разных режимах.
- Сложность наладки. Точные параметры электропривода известны далеко не всегда. Настройка векторных преобразователей часто требует многочисленных коррекций настроек по ходу пуско-наладки.
Кроме того, векторные преобразователи частоты не могут осуществлять группою управление несколькими однотипными электроприводами.
Заключение
Способы управления преобразователем частоты определяются условиями эксплуатации и функциями электропривода.
Пуск, реверс и остановка с панели ПЧ осуществляются при установке аппарата по месту, например, непосредственно на станке.
Внешнее управление частотным преобразователем через выносные пульты, аналоговые и цифровые входы, интерфейс RS485 и другие протоколы промышленной связи используют для удаленного режима и в схемах автоматического регулирования по одному или нескольким технологическим параметрам.
Метод управления ПЧ выбирают исходя из требуемых функций привода, технической экономической целесообразности. Для относительно простого оборудования, не требующего точного поддержания скорости и регулирования момента, подойдет скалярный преобразователь. Такие ПЧ используют в приводах насосов, вентиляторов, станков для обработки металла и дерева и т.д.
Векторные частотные преобразователи выбирают для приводов, где требуется управление моментом, а также для оборудования с высокими требованиями к точности регулирования скорости. ПЧ такого типа используют для лифтов, кранов, дробилок, дозаторов, мотальным машин и т.д.
Большинство современных ПЧ – многофункциональные устройства, позволяющие реализовать как векторный, так и скалярный способ управления. Выбор метода осуществляется по условиям работы электропривода.